Servo Controller
8x RC-type Servo controller
Servos are standard equipment used in radio controlled cars, airplanes, boats,...
Servos are basically a geared down motor with a position feedback sensor. This is usually a potentiometer. RC-type servos usually have three leads: GND, positive supply (4.5-5V), and the control input.
To tell the servo where it should turn, it requires a square wave on the control input. This square wave is modulated (PWM, pulse width modulation). The on/off percentage is called "duty cycle", and the time between the square wave signal "restarts" is called period.
The period for RC servos is around 20ms (18-21ms). The PWM "on time" for one end of the movement range is about 1ms, and 2ms for the other end of the movement range.
Angular movement ranges of servos usually range from about 90 degrees to about 180-200 degrees.
Available or planned PHCC Servo Daughterboards
DOA_servo
Features:
- 8 channels/servos per board
- 8 bit resolution, this equals 256 different positions
- refresh/update rate: approx 20ms.
- small board size (50x80mm, 1/4 Euro size)
- each Servo can be indiviually calibrated
- with a zero offset (16 bit)
- and with a (8 bit) gain (or multiplier)
- this allows good control over the min and max positions as well as the servo swing (movment angle)
- controlled via the PHCC DOA bus with the AP2P Protocol.
- multiple servo controllers can be connected to the DOA bus...
- along with other DOA bus devices (up to 256 devices currently)
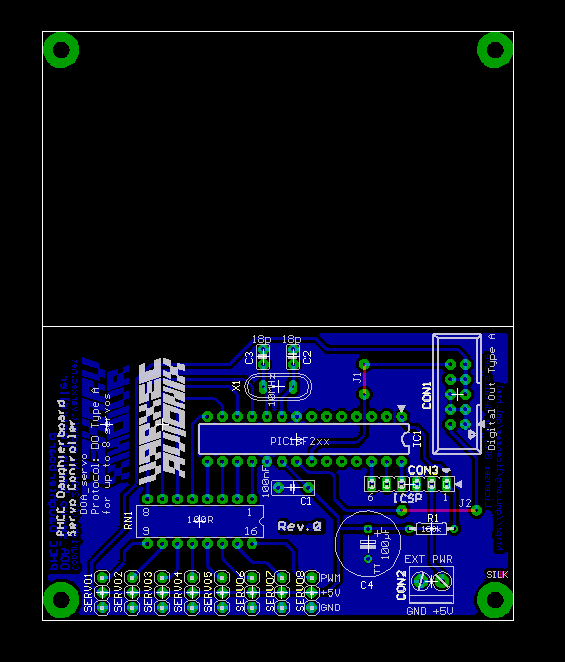 |
| Click to enlarge [25k, 565x662] |
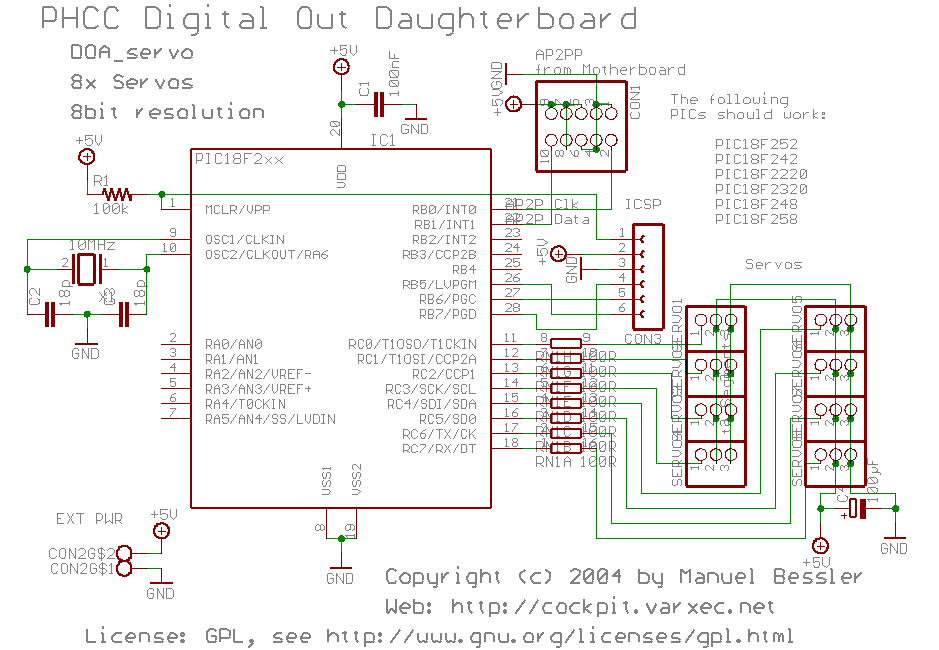 |
| Click to enlarge [30k, 939x650] |
Bill of Materials
The BOM is here: PHCC_DOA_8servo.BOM.txt
This list includes prices and links to to online catalogue pages of my primary source of electronics components, Reichelt Elektronik
